
Theme/主题: Architectural Behaviourial Modular System/建筑行为模块系统
University/大学: AADRL (Architectural Association, Design Research Laboratory), London, UK/建筑联盟设计研究实验室,英国,伦敦
Team/团队: Dmytro Aranchii (Ukraine), Paul Bart (Germany), Yuqiu Jiang (China), Flavia Santos (Brazil)
Tutor/指导教师: Mostafa El Sayed
Studio/工作室: Theodore Spyropoulos Studio
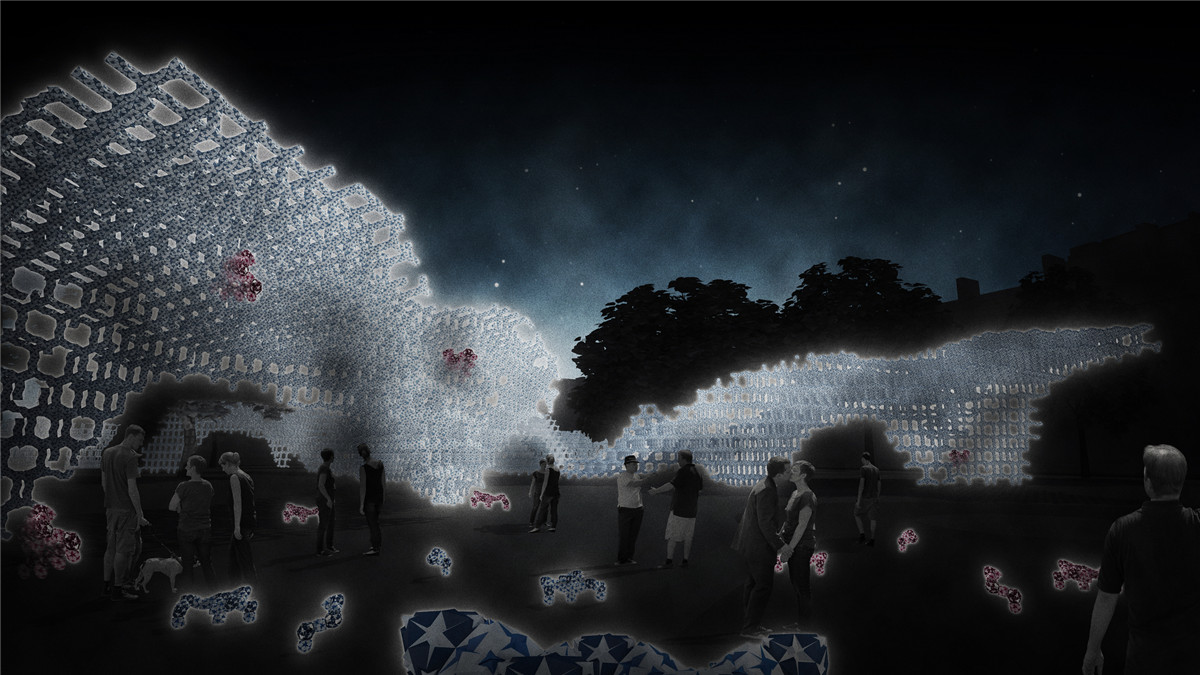

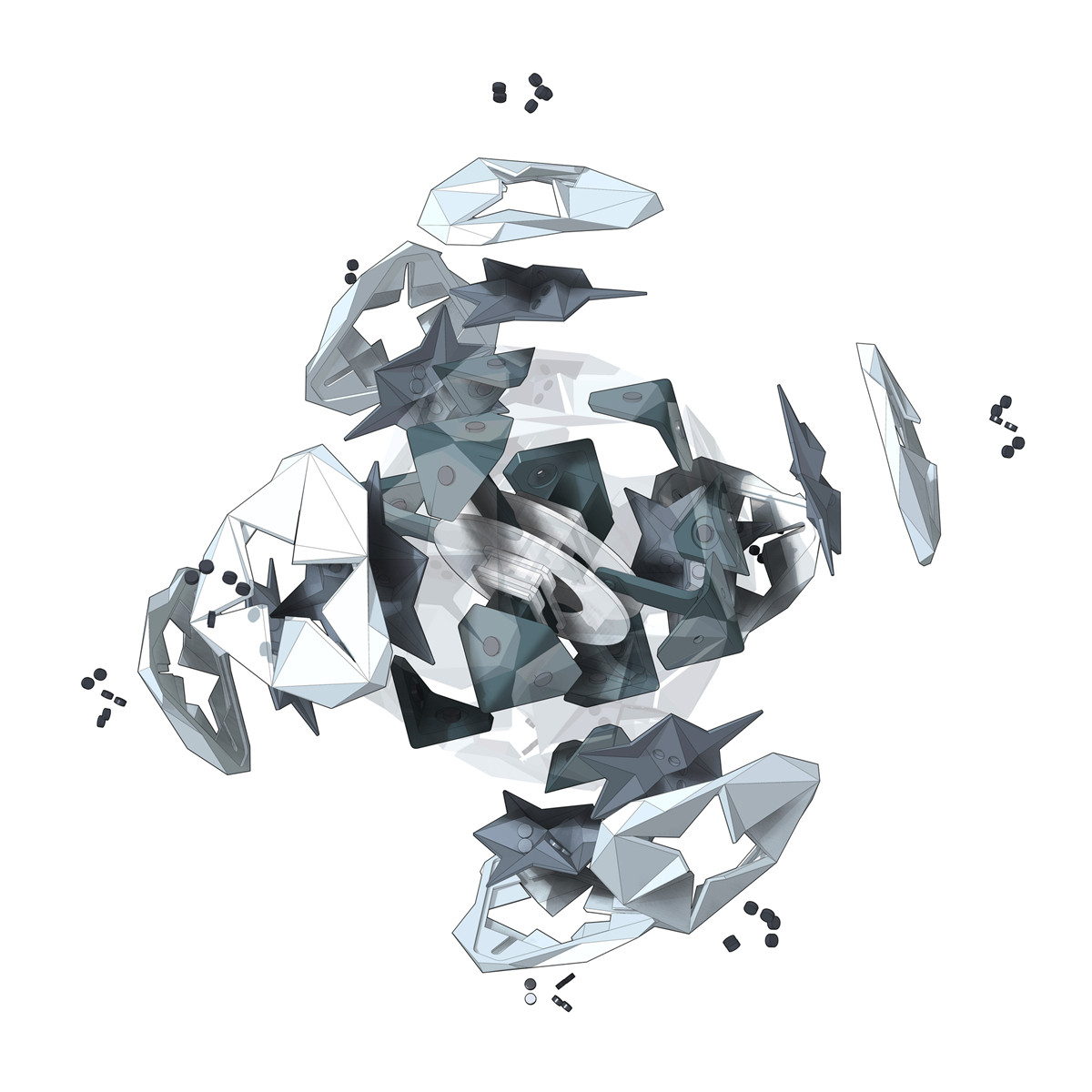
建筑是一种有自我意识的群体。这是noMad所传达出来的信息。noMad是由类似巴克敏斯特富勒几何结构组成的环境系统。这个系统可以根据每个单元所获取和处理的数据进行完全自主编译。项目由来自AA(Architectural Association)学生Dmytro Aranchii, Paul Bart, Yuqiu Jiang, 和Flavia Santos 设计完成,noMad的概念十分简单,小的驱动单元体附带磁力表面,这些表面的连接使得小的单元重新组成成为新的几何形态。将多个单元组合在一起,noMad演变成了一种全新的建筑形式:无限,可移动和无限的适应性。
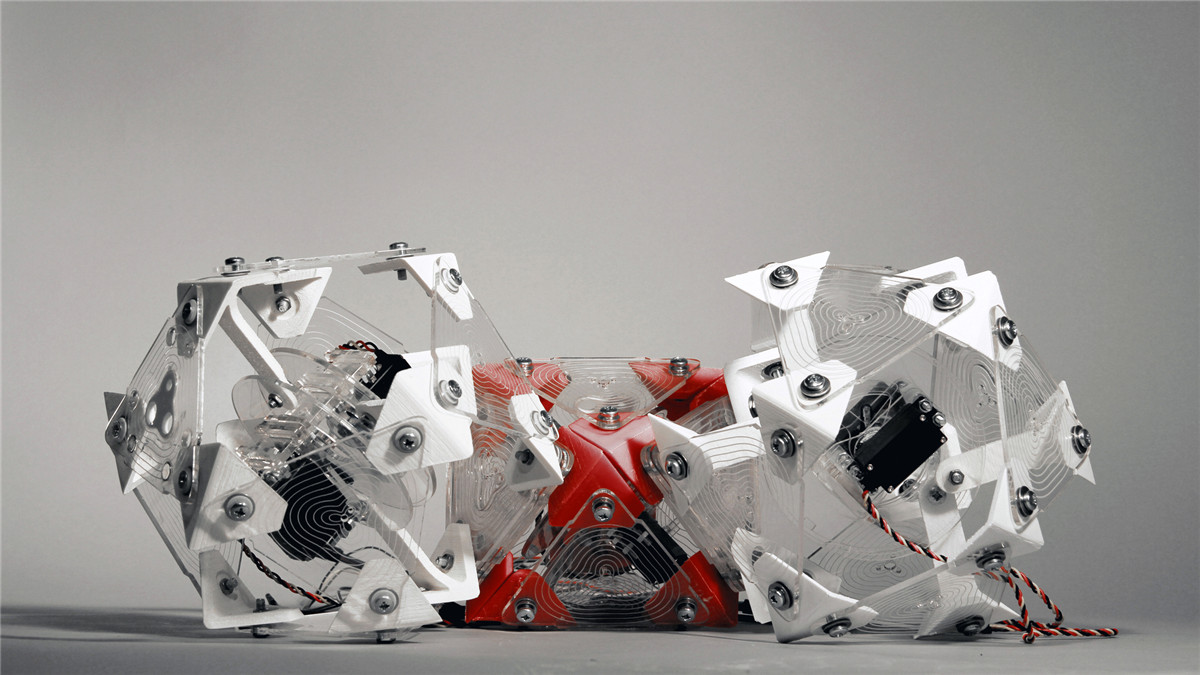

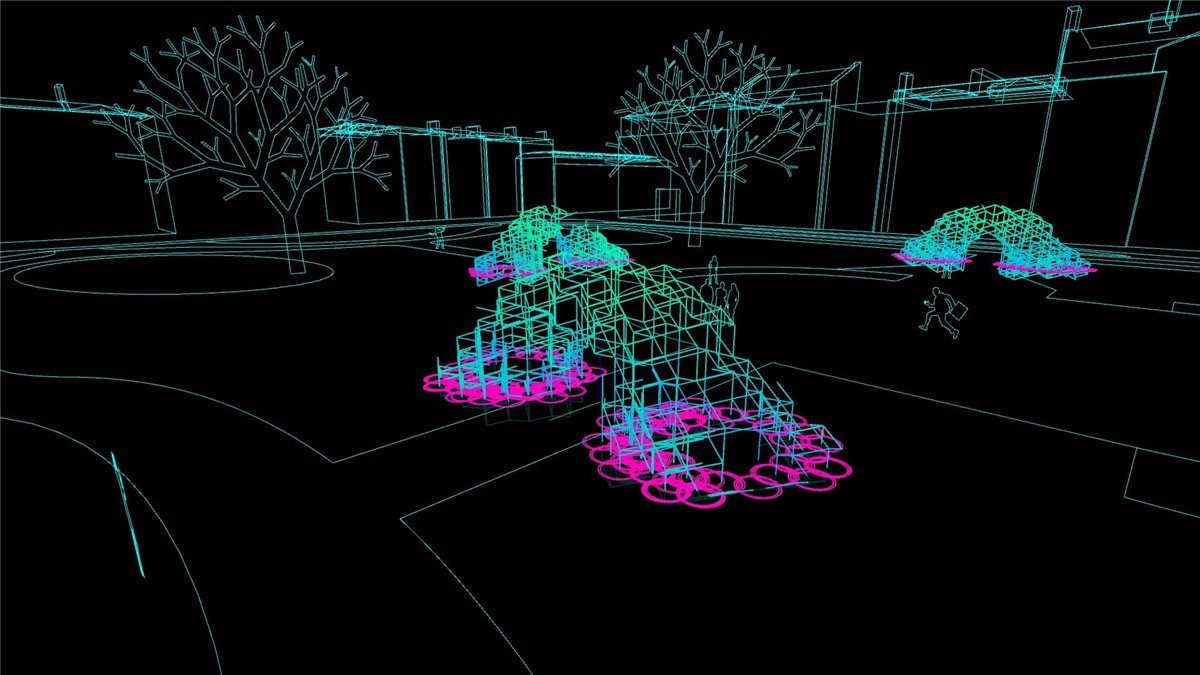
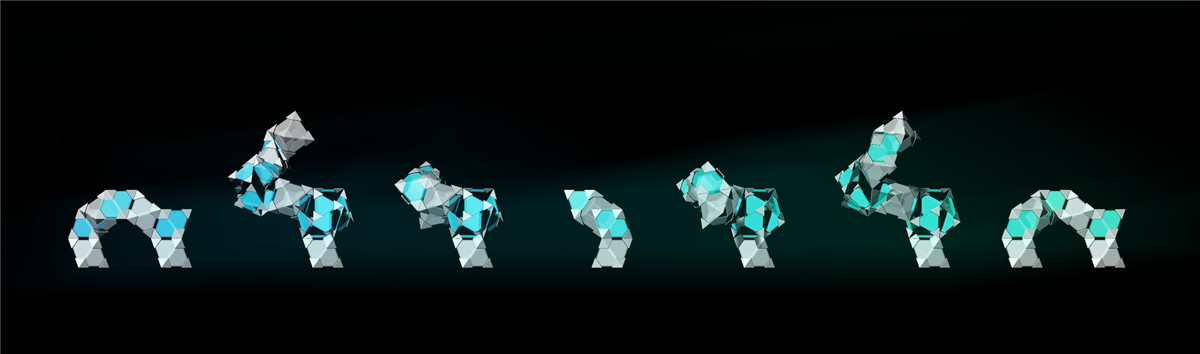
正如noMad视频所阐释的那样,机动单元可以进行展开运动、直线运动和旋转运动。一连串的单元组合可以形成基本的结构体系,可以发挥他们各自的作用,并且通过调整单元在系统中的排布来增强整个结构体系。至此,noMad是一个有着创新和很好的工业设计的建筑单元,这一单元可以重新修正和配置自己;这一成就可以被认为是未来建筑的一种相对标准。这一概念与迪斯尼皮克斯的 Hero 6中纳米机器人的概念也十分相似。
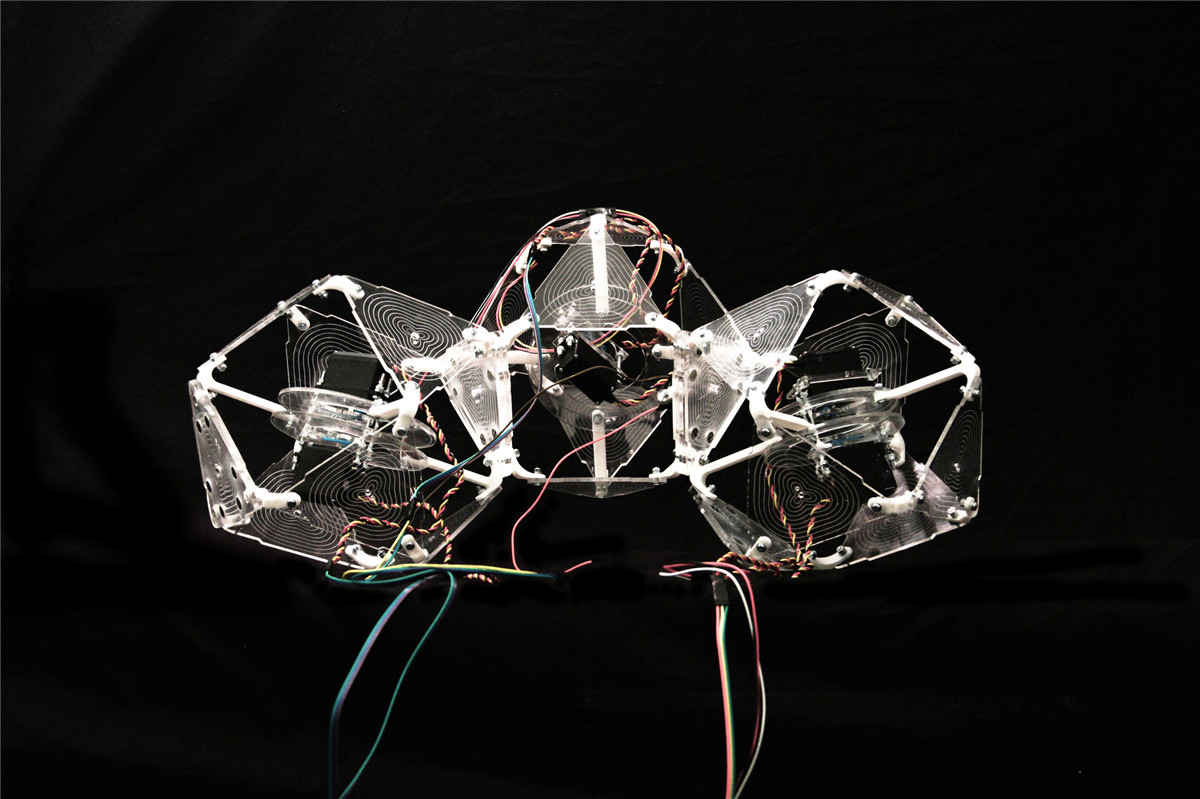
是什么使得这一提案进入概念和原型机阶段。在MIT和Cornell的世界顶级机器人实验室的帮助下,制作出来的原型机可以做到相互结合的行为,虽然有些缓慢和繁琐。所有这些行为不是被人所支配,而是都来源于机械单元自身的行为。基本的移动和传感装置被植入每个单元之中,这一项目的创造者希望noMad可以形成一种群体智能的形态。
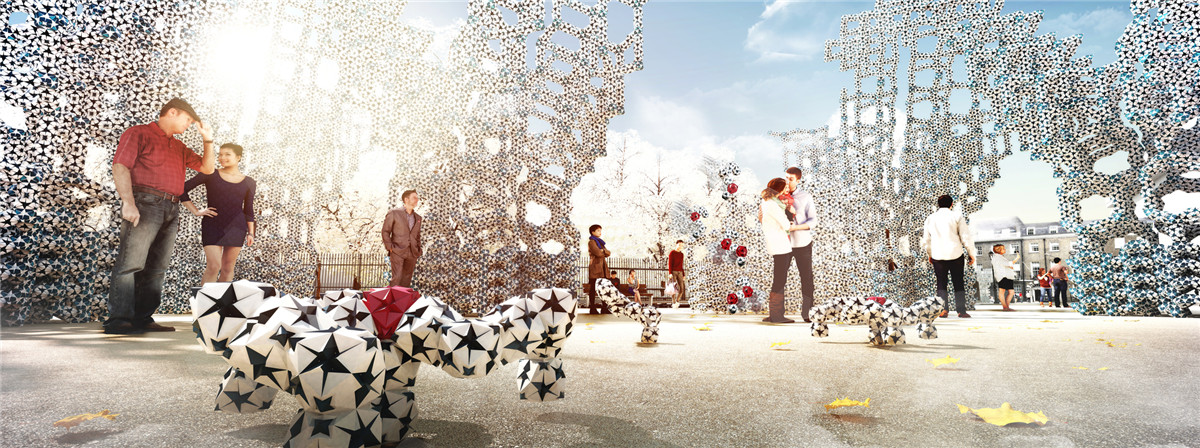
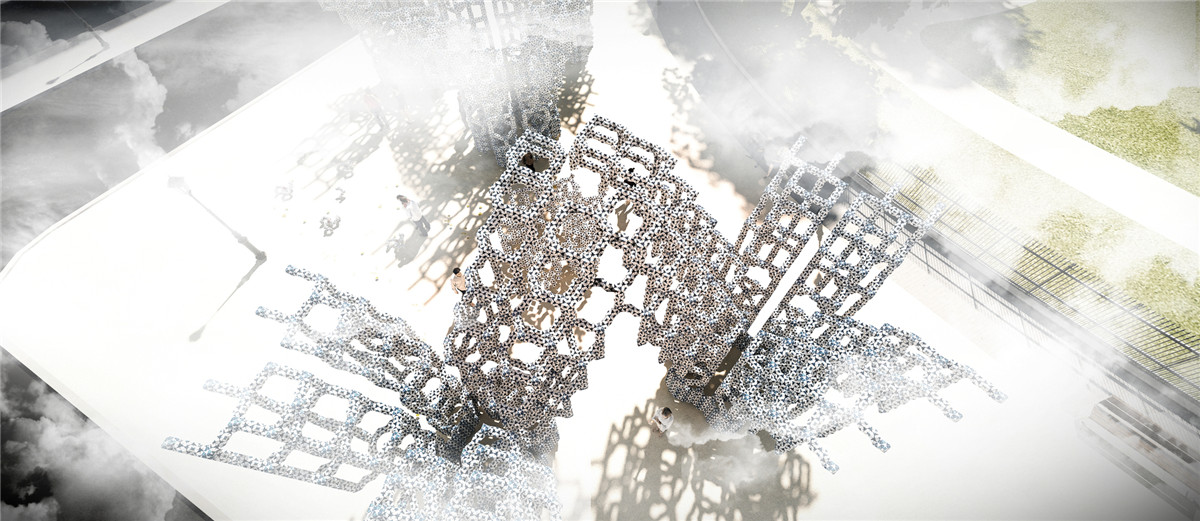
群体智能(swarm intelligence)的实现与否主导了整个项目。如果没有互动性,移动性就变得没有什么意义;noMad是迈向未来主义的合理跃进。但是,虽然这是合理的,它是否有理由存在于现实生活中?除了形成一种公共艺术作品或者装置之外,在项目的演示中也提及了关于形成一种可移动的实际结构的可能性。这种可能性对于关注未来主义理念的人十分有吸引力,并且从工程角度来讲也是十分难以置信的壮举。
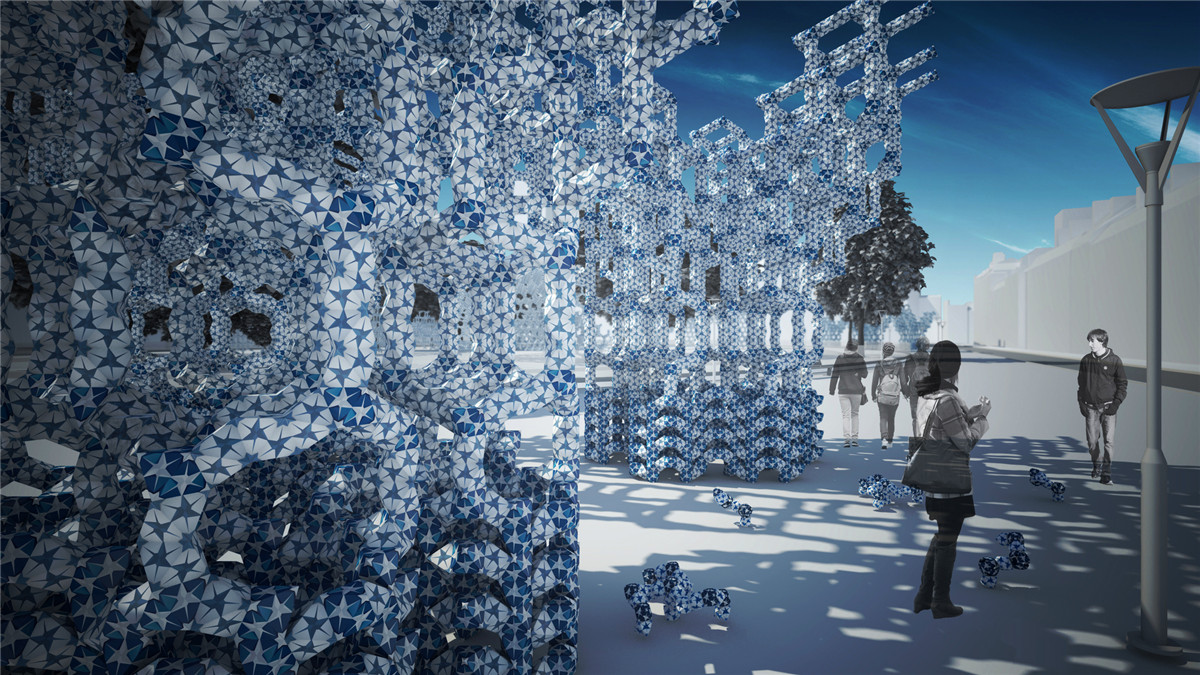
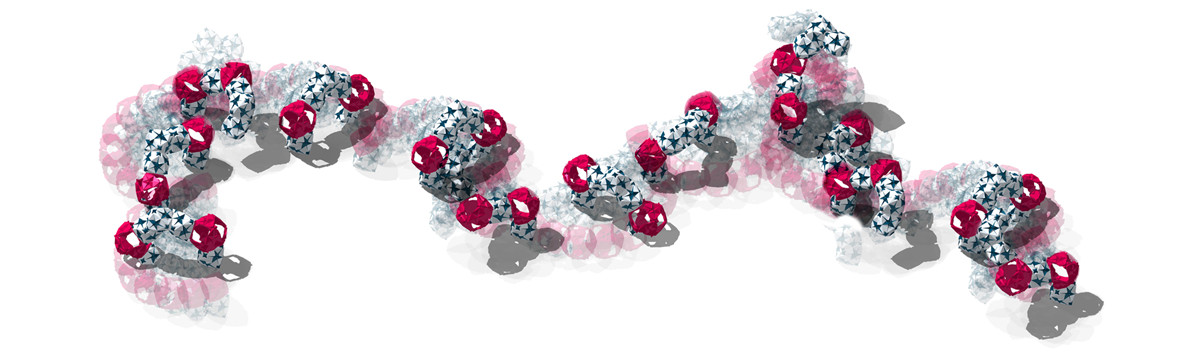
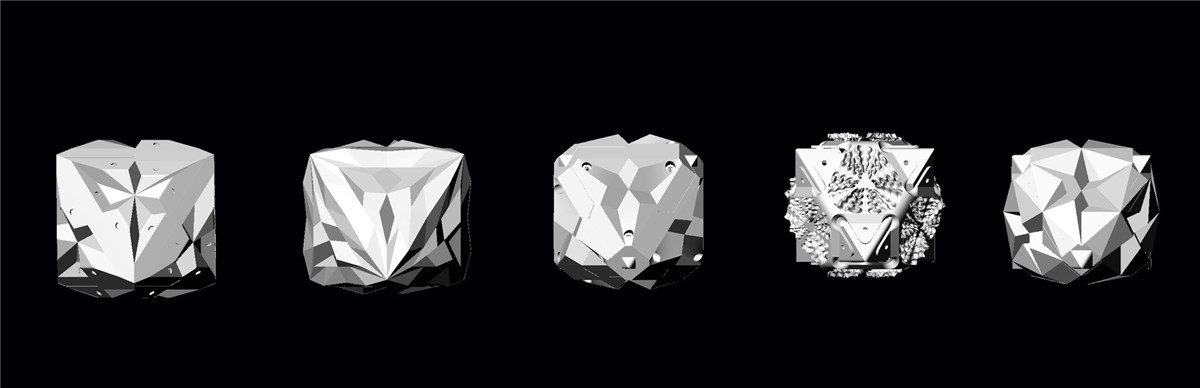


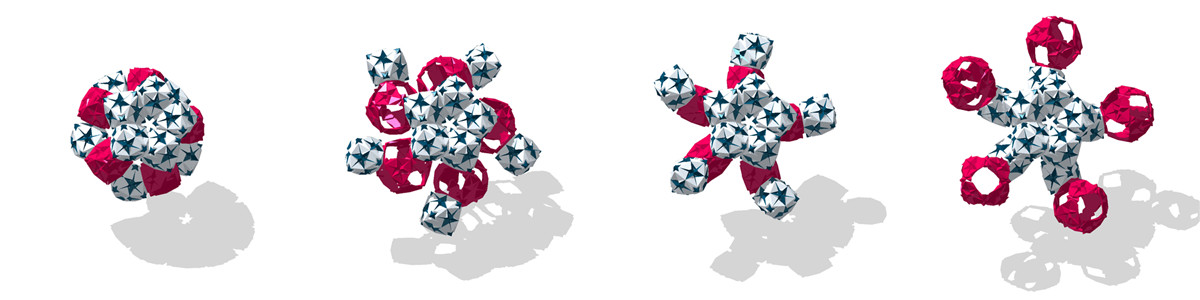


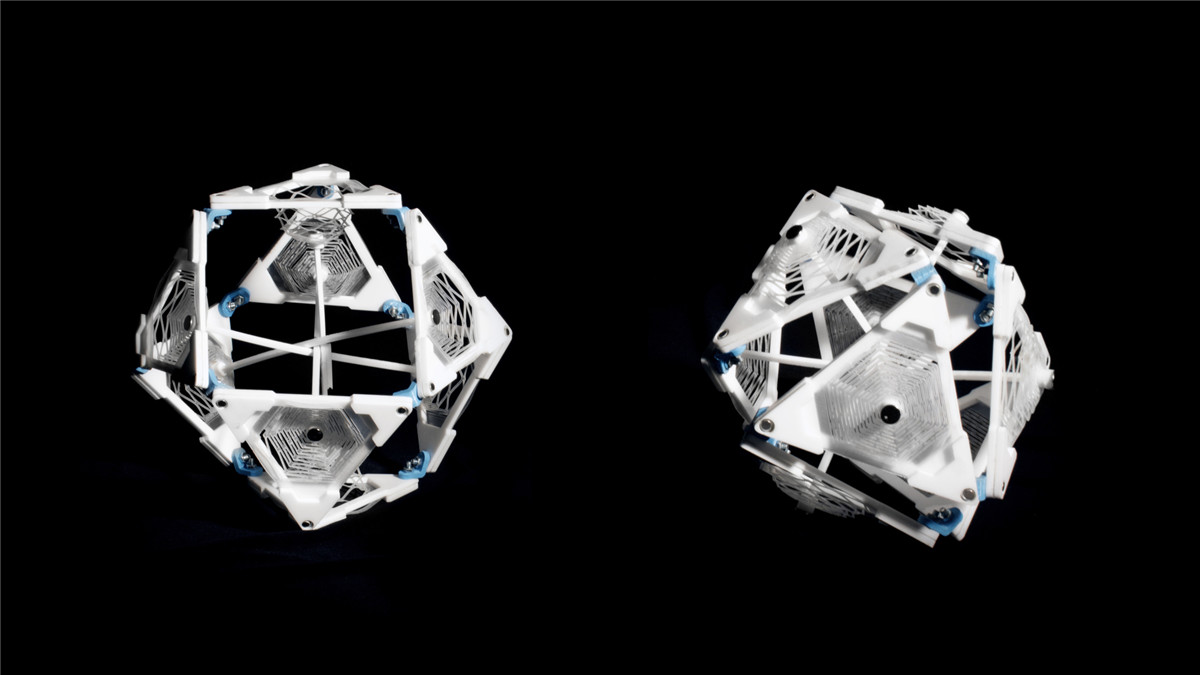
Architecture is a swarm, and a self aware one at that. That’s the vision presented by noMad: a built environment made of Buckminster Fuller-like geometric structures that compile themselves entirely autonomously, according to data gathered and processed by the units. Developed by Architectural Association students Dmytro Aranchii, Paul Bart, Yuqiu Jiang, and Flavia Santos, on a basic level noMad’s concept is fairly simple – a small unit of motors that is attached to several magnetic faces, which can be reoriented into different shapes. Put multiple units together, however, and noMad’s vision becomes an entirely new form of architecture: non-finite, mobile and infinitely adaptable.
As noMad’s video demonstrates, motorized units are capable of expansion, linear movement and rotational movement. Together, strings of these units are capable of assembling themselves into rudimentary structures, can function as their own cranes and reinforce themselves if needed by rapidly passing units along the structure. So far, noMad is an innovative and well engineered unit of building that can reconfigure itself; while certainly an achievement, it’s a relatively standard feature of futurist architecture – it’s even a fairly similar concept to one recently deployed in Disney Pixar’s Big Hero 6, which uses collaborative nano-bots to similar effect.
What separates this from many proposals is the level of plausible robotics put into the concept and prototypes. Developed with the help of the world’s leading robotics labs at Cornell and MIT, the prototypes, while relatively slow moving and cumbersome, can actually do what the team claim. The second separation is that all this isn’t being directed by someone at the side of the site: each unit moves itself. Basic movements and sensors are built and programmed into the units and as more units join, the creators claim and hope that noMad will be able to network itself and form a swarm intelligence – the team themselves call it “trivial AI.”
Should the swarm intelligence aspect come to fruition, the project changes entirely. Mobile isn’t very useful without reactive; together noMad is a plausible leap into futurism. But while it’s plausible, is there a reason for it to exist in real life? Besides forming a kind of public artwork or installation, there’s little that these moving mega-structures are shown to practically do in the team’s presentation. For some, this proposal will raise the question “what is the point of all this?”
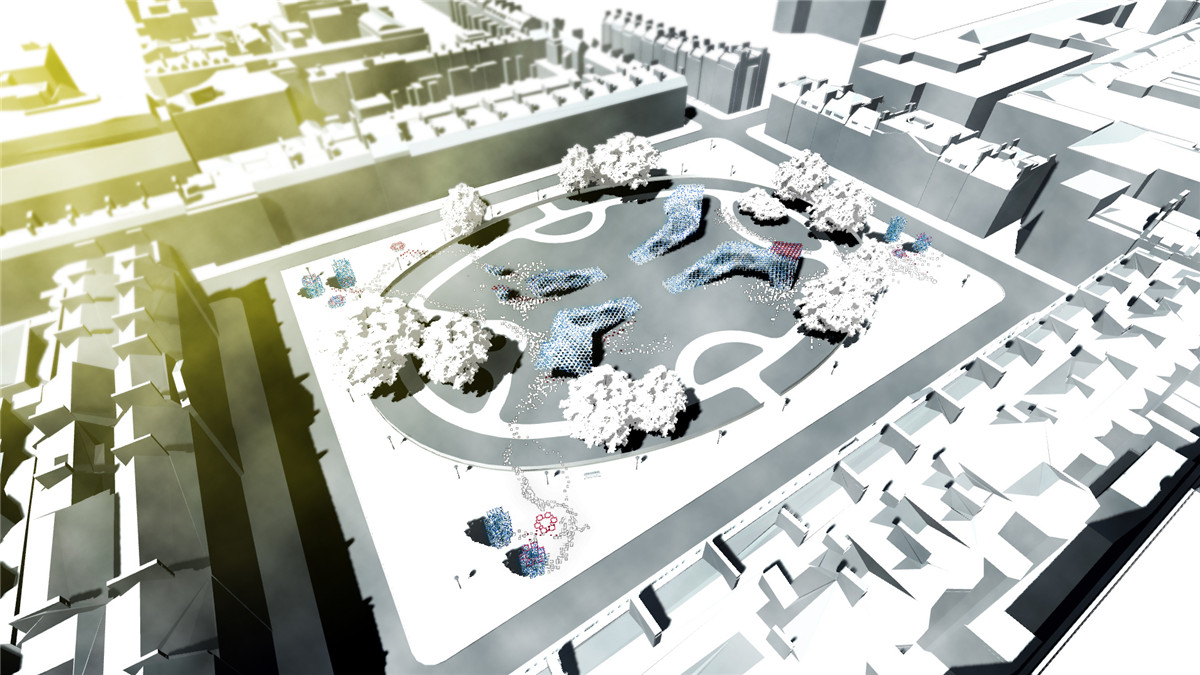
But for some what it can do is enough; it certainly will be enough to deserve existence. The astonishing proposal of thousands of noMad units moving autonomously around London is seductive for people who are fond of futurist ideas and an incredible feat of engineering, and perhaps deserves recognition simply for its connection of an implausible future with an engineered solution.
![]()